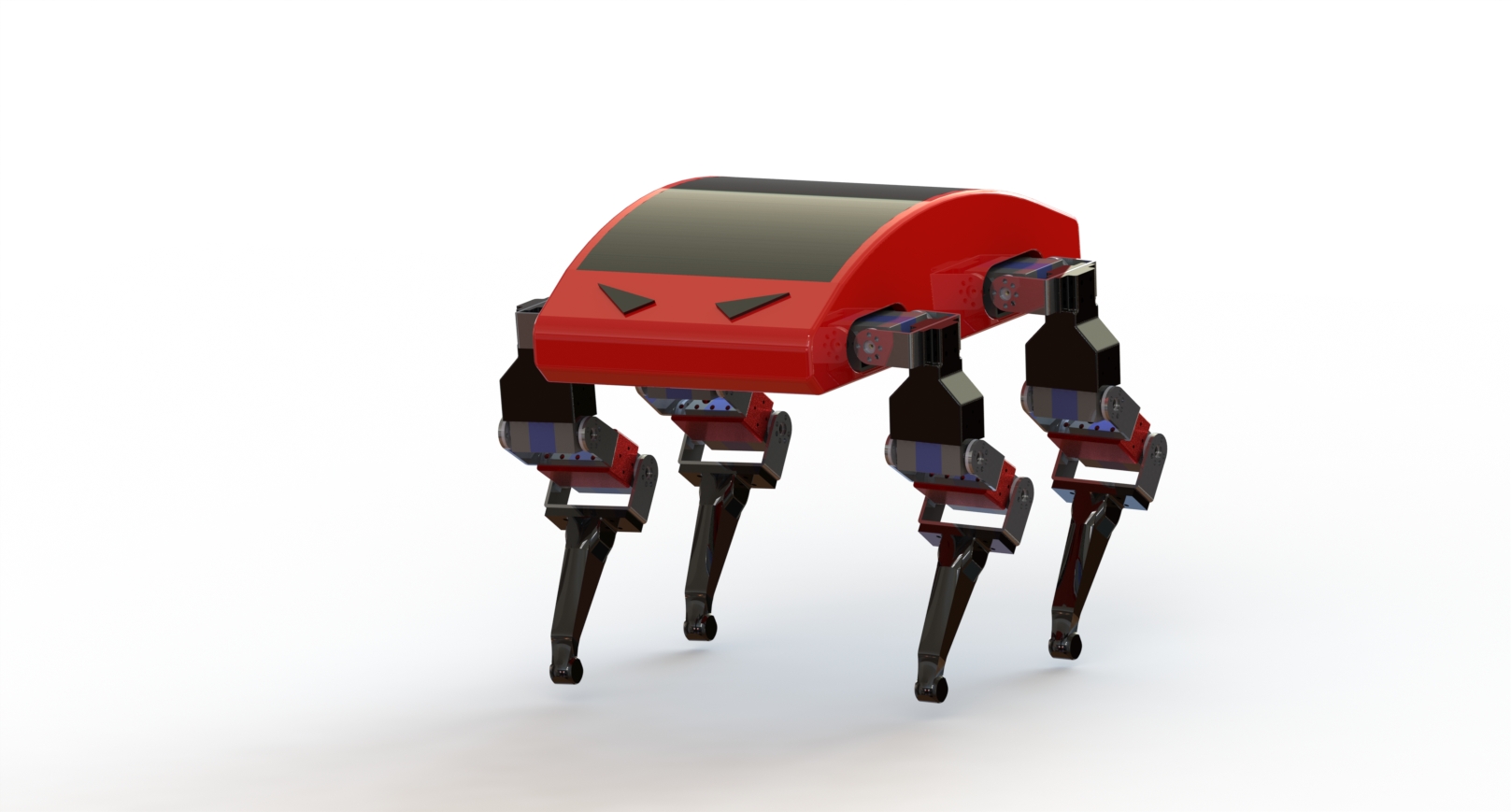
Quadruped
Four Legged Robot
In this project, I led the design and development of a quadruped
robot, which involved complex mechanical, electrical, and software
integration. The goal was to create a robust, four-legged
autonomous robot capable of navigating dynamic environments. Using
CAD tools like Solidworks and PTC Creo, I designed the robot’s
structure, focusing on weight distribution and mechanical
strength. The control system relied on ROS and a custom motion
planning algorithm that allowed the robot to adjust its gait in
real-time based on the environment. I implemented dynamic path
planning to ensure obstacle avoidance and smooth navigation. This
project won a state-level robotics championship and significantly
advanced my understanding of autonomous navigation and robotic
kinematics.
Multi-Robot System Software Module
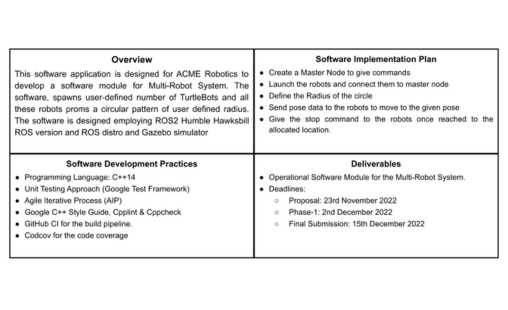
In this project, I developed a software module for a multi-robot
system, focusing on coordination and communication between robots.
The system was designed to optimize task execution by distributing
tasks among multiple robots, ensuring efficient task completion
with minimal redundancy. I used ROS to manage inter-robot
communication and integrated sensors for real-time data exchange,
enabling the robots to adjust their paths based on the actions of
other robots in the system. This project demonstrated my ability
to build complex systems that require real-time collaboration
between autonomous robots.
Dynamic Path Planning and Replanning Using RRT* for Autonomous
Robots
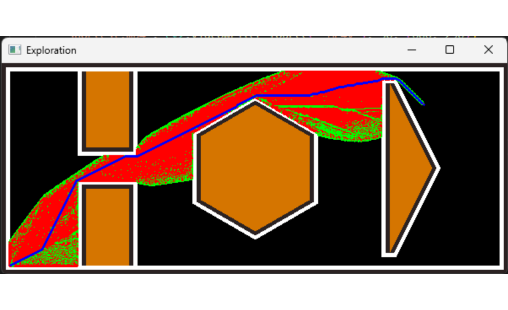
This project involved the development of dynamic path-planning
algorithms for an autonomous robot to navigate unpredictable
environments. Using ROS and Gazebo for simulation, I implemented
global path planning using Dijkstra and A* algorithms, while
employing local planners for real-time obstacle avoidance. The
robot successfully navigated a test environment while dynamically
adjusting its path based on sensor input. This project not only
refined my understanding of planning algorithms but also helped me
master ROS and simulation tools like Rviz and Gazebo.
AI-Driven Real-Time Image Captioning for Enhanced
Accessibility
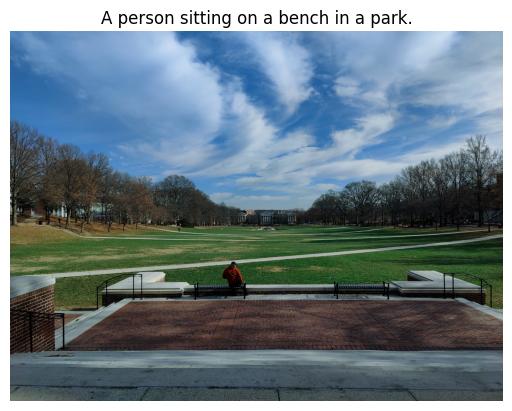
This project aimed to assist visually impaired individuals by
developing an AI-driven image captioning system. I trained a deep
learning model using the Inception V3 CNN encoder for feature
extraction, reaching a 92% accuracy rate in generating descriptive
captions from real-time video feeds. To optimize real-time
performance, I implemented Block Static Expansion and multi-headed
attention vectors, which improved both accuracy and response time.
Additionally, I developed Python scripts for seamless integration
with mobile devices, enabling visually impaired users to capture
and process video in real-time, with automatic caption generation
and voice narration. This project highlighted my ability to apply
AI solutions for real-world accessibility challenges.
Semantic Segmentation for Real-Time Food Item Recognition
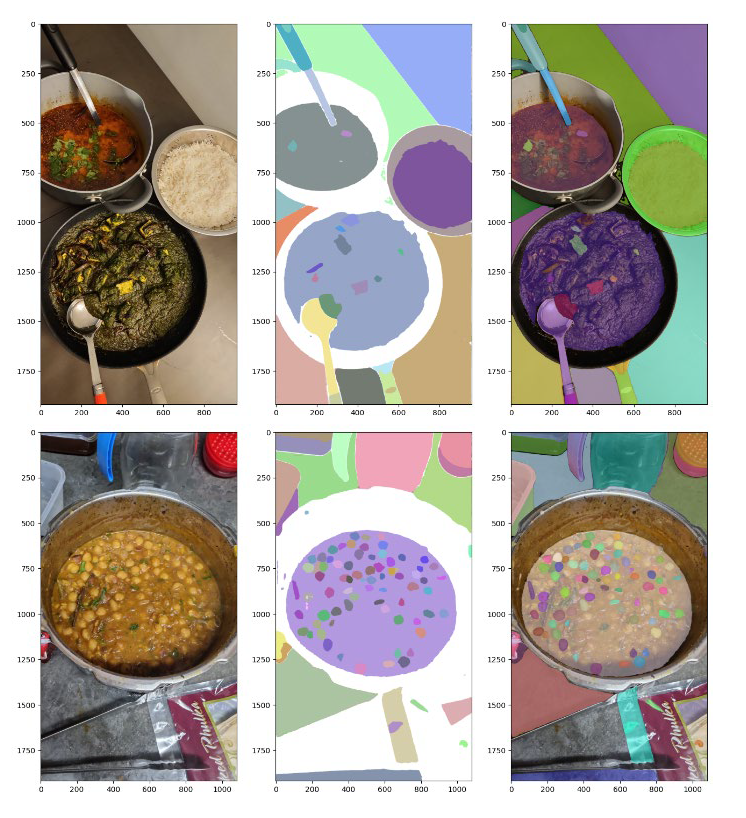
This project revolved around real-time food item segmentation
using deep learning techniques. I employed RNN-based ResNet50 and
PointRend architectures to achieve an 80% accuracy rate in food
item segmentation from live video feeds. Using transfer learning,
I was able to improve model performance, reaching 67% test
accuracy on a limited dataset of 4,935 training images and 2,135
test images, outperforming a custom model’s 43% accuracy.
Fine-tuning pre-trained architectures allowed me to develop a
reliable and efficient segmentation system, which was aimed at
applications in food identification and inventory management in
commercial kitchens.
Autonomous
Pick and Place Robot
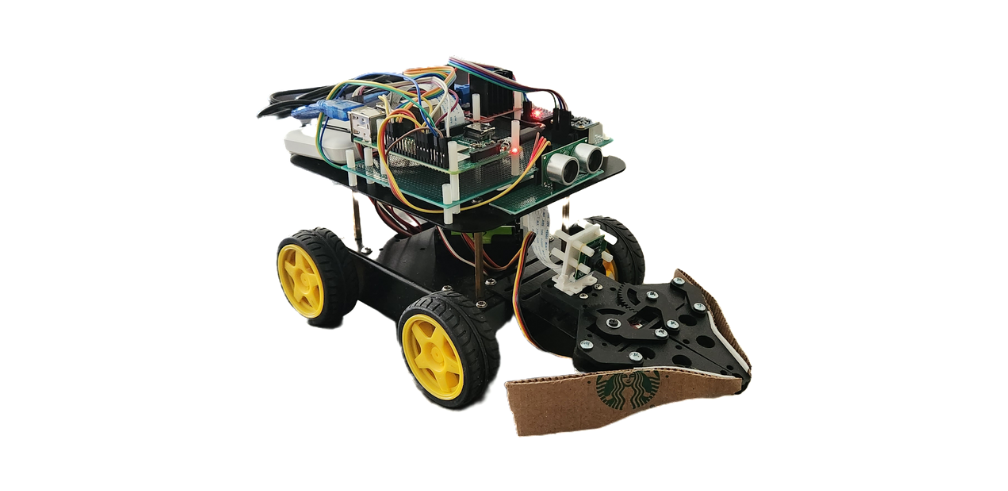
This project involved the design and development of an autonomous
robot capable of picking and placing color-coded blocks in a
designated area. I engineered a real-time color detection system
using a Pi Camera, which was integrated with the A* path planning
algorithm to ensure accurate retrieval and placement of the
blocks. The robot was equipped with IMU sensors (MPU6050) and
encoders for precise navigation, and I implemented PID control for
stable maneuvering. Obstacle avoidance was achieved through the
use of ultrasonic sensors, allowing the robot to navigate
dynamically changing environments. The project achieved an 80%
success rate in goal placement, demonstrating effective robot
localization and task execution.
Miniature Statue Manufacturing

In this project, I led a team to scan and 3D print miniature
replicas of an 11ft statue to celebrate the 75th anniversary of my
university. We used a 3D scanner to capture the intricate details
of the original statue, and I led the scanning process to ensure
accuracy and completeness of the data. Using Fusion 360, I
performed reverse engineering to create a CAD model from the
scanned data. I then used 3D printing technology to produce
prototypes with different printing parameters, optimizing for
quality, speed, and material usage. The final models were produced
and distributed to over 1000 alumni attendees.
Human Tracking Software Module with Real-Time Object
Detection
This project focused on building a human tracking system using
advanced object detection algorithms in C++. I integrated the
YOLOv3 model for real-time detection, which achieved an 84%
confidence level and 99 ms inference time on the MS-COCO dataset.
I also incorporated a KCF tracker for precise tracking across
164,000 images, enabling reliable performance in dynamic
environments. This project demonstrated significant improvement in
accuracy and efficiency. To further enhance development, I
integrated CI/CD pipelines with Travis CI and Coveralls, which
boosted code quality and testing coverage. The module was used in
a multi-robot system, where the detection and tracking data fed
into autonomous path-planning algorithms for mobile robots.
Perception Project with TurtleBot 3 WafflePi
In this perception-focused project, I worked with the TurtleBot 3
WafflePi to autonomously navigate through a set of waypoints on a
flat surface. My key contribution was calibrating the monocular
camera using a checkerboard pattern to derive intrinsic and
extrinsic parameters. From there, I calculated the homography of
the floor, identified the vanishing point, and determined the
horizon line, enabling the robot to detect and follow waypoints
seamlessly. Additionally, I integrated YOLO-based stop sign
detection, allowing the robot to recognize and respond to stop
signs in varying orientations. This project sharpened my skills in
perception, camera calibration, and robot path planning.
IoT-Based Wastewater Spillage Detection System
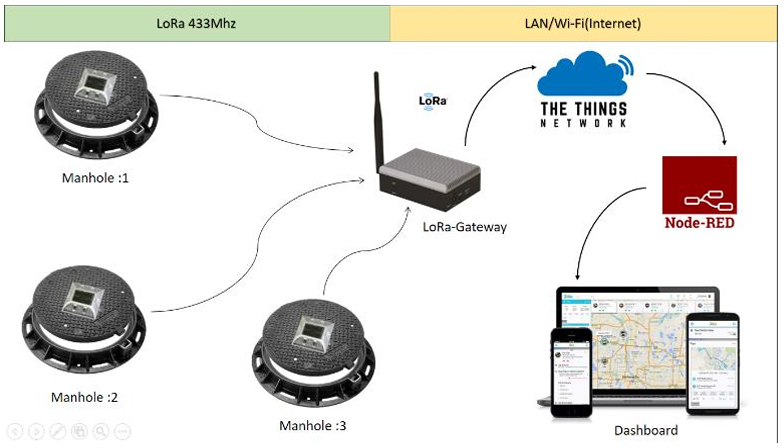
I co-invented a patented IoT-based wastewater spillage detection
system designed to monitor and alert authorities of any spillage
in real-time. The system integrates multiple sensors to detect
abnormal spillage patterns, and the data is transmitted via IoT
devices to a centralized system for monitoring and action. This
project combined sensor networks, data transmission protocols, and
environmental monitoring technologies to create a solution that
can have a significant impact on environmental safety.
RESTful API Server for Robot Management System
I developed a RESTful API server to manage a collection of
OpenRAVE robots using Debian , Docker, and Python. This project
aimed to provide a scalable and efficient solution for handling
multiple robot configurations stored in JSON format. I utilized
Python's Flask framework to implement CRUD operations, allowing
for seamless robot data management through endpoints for adding,
updating, and deleting robot specifications. Additionally, I
containerized the API server using Docker to ensure consistent
deployment and compatibility across different environments. The
server could efficiently parse JSON requests, validate robot
parameters, and provide real-time data response, thereby improving
the robotic fleet management workflow. This project deepened my
understanding of REST API architecture, Docker containerization,
and robotic data handling.
Comparison of 2D Mapping Algorithms
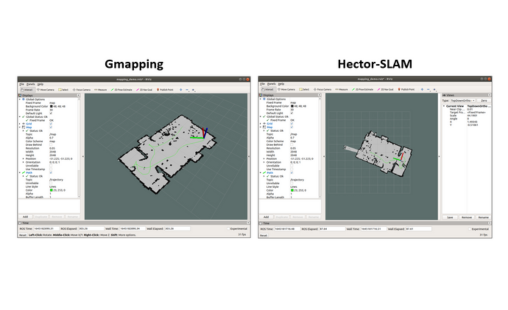
Conducted a comprehensive evaluation of 2D mapping algorithms,
including HectorSLAM, Cartographer, and Gmapping. Mapped a 20,000
sqft hostel floor to validate the study, providing actionable
insights for optimal mapping algorithm selection.
This project involved setting up a robotic control system for a
collaborative robot (FRCobot) using ROS2, leveraging its real-time
communication capabilities with DDS (Data Distribution Service)
for reliable control. I created a ROS2 workspace and developed
custom Python nodes for joint control, sensor processing, and
safety features. Using URDF models, I defined the robot's
kinematics and visualized it in RViz2, ensuring accurate
transformations. I also configured MoveIt2 for motion planning,
enabling pick-and-place and obstacle avoidance tasks, and
integrated Gazebo for simulation to validate control algorithms
before hardware deployment.
Autonomous Rover for Indoor and Outdoor Navigation
I designed and developed an autonomous rover capable of navigating
both indoor and outdoor environments using SLAM-based and
GPS-based navigation, respectively. The rover's indoor navigation
was achieved using the Gmapping SLAM algorithm, which combined
LIDAR and wheel odometry data for precise localization and mapping
of the environment. For outdoor navigation, I integrated a GPS
module that allowed the rover to accurately navigate through
predefined waypoints in open areas. The project also involved
developing a ROS-based control system to seamlessly switch between
SLAM and GPS modes, ensuring continuous navigation without manual
intervention. I implemented an Extended Kalman Filter (EKF) to
fuse sensor data, achieving high accuracy in localization and
reducing drift over time. Despite constraints on funding and a
tight timeline, I sourced aluminum materials and fabricated custom
mounts to house the sensors and electronic components, maintaining
a balance between durability and weight. The final prototype
demonstrated robust autonomous navigation in a mixed environment,
showcasing my proficiency in integrating SLAM, GPS, and ROS, as
well as expertise in sensor fusion techniques for practical
robotic applications.